
“Tracking type” in AR refers to how the glasses determine the user’s motion and the real-world coordinate system, so that virtual content stays locked to the correct positions.

1) SLAM tracking (Simultaneous Localization and Mapping)
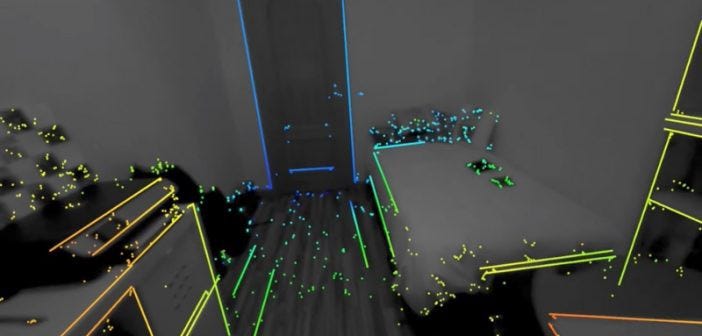
Idea: The glasses create and update a map of the environment while estimating their own position within it.
How it works (high level)
- Use cameras (and often IMU) to detect visual features.
- Estimate the device pose (position + orientation) relative to previously seen features.
- Build/update a 3D map (point cloud, planes, sometimes meshes).
- Use the map to keep anchors stable.
Pros
- Works in many environments (especially those with texture/visual features).
- Doesn’t require pre-built markers or special setup.
- Can support larger spaces because it continuously builds the world model.
Cons/failure modes
- Can drift over time (though modern SLAM reduces this a lot).
- Performance drops in low light, motion blur, or low-texture scenes (blank walls).
- Changes in the environment can reduce stability.
2) Marker-based tracking
Idea: The system recognizes known “targets” (markers) in the scene and uses them to compute pose.
Common marker types:
- Visual fiducials: QR-like patterns, ArUco markers, AprilTags.
- Feature targets: printed images or special tracking cards.
- Visual anchor images: sometimes called image-based tracking (detecting reference pictures).
- UWB/Beacon-based (not visual, but “marker-like” anchors): device measures distance to known beacons.
How it works (high level)
- The camera detects the marker (or reference target).
- The glasses compute pose directly from the detected marker geometry.
- Virtual content is anchored to that marker’s known location.
Pros
- Often very stable and accurate as long as the marker is visible.
- Less computationally heavy than full SLAM in some setups.
- Great for repeatable tasks (training modules, industrial workstations).
Cons/failure modes
- Needs markers/targets present (or pre-installed environments).
- If the marker is occluded, moved, or out of view → tracking can fail or fall back.
- Less flexible for roaming/unknown environments unless you install lots of markers or use many reference targets.
3) When each is typically chosen
- SLAM: general-purpose AR, warehouses you move through, museums, outdoor/varied environments.
- Marker-based: factory assembly stations, labs, classrooms, “put this part here” workflows on fixed fixtures.
4) Hybrid approach (common in real products)
Many systems use both:
- Marker-based when targets are visible (stability/accuracy)
- SLAM when markers aren’t visible (coverage)
5) How to tell them apart in practice
- With SLAM, anchors generally “hold” as you move around, even without markers — until tracking starts to decline.
- With marker-based tracking, it works best when you can see the markers; occlusion or leaving the area often leads to noticeable tracking issues.